|
|
 |
|
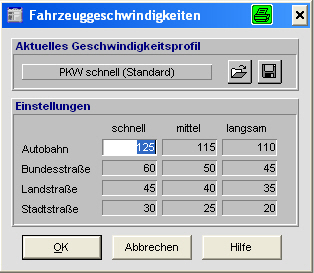
Wie funktioniert ein GPS-Navigationsgerät bzw. ein Routenplaner? Das GPS-Navigationsgerät (auch Navi oder bei aktivierter Sprachausgabe Uschi genannt) besteht aus zwei Modulen, dem GPS-Modul und dem Routenplaner. A) GPS-Modul Das GPS-Modul bestimmt die Position des Empfängers auf der Erdoberfläche (...oder in der Luft). Den so ermittelten Standort übergibt das GPS-Modul an den Routenplaner. B) Routenplaner Ein Routenplaner besteht aus einer routing-fähigen, digitalen Landkarte und der Routenplanungssoftware. Eine routing-fähige Landkarte enthält die Verkehrswege mit ihrem exakten Verlauf und der zugehörigen Beschreibung/Charakteristik, die die Routenplanungssoftware braucht, um einen geeignete Route und die zugehörige Entfernung und Fahrzeit zu ermitteln. Zwei Anbieter dominieren weltweit das Geschäft mit digitalen Karten: Navteq aus den USA und TeleAtlas, ein niederländisch-belgisches Unternehmen. Die Preise sind entsprechend hoch, die Aktualisierung erfolgt eher schleppend. Je nach Fahrzeug (z. B. schneller Pkw oder langsamer Lkw) benutzt die Routenplanungs- software sog. Geschwindigkeitsprofile, die mit der Charakteristik der Verkehrswege die Geschwindigkeit auf dem jeweiligen Routensegment ergeben. Die Summe dieser Geschwindigkeiten je Segment ist die Fahrtzeit zum Ziel. |
|
|
|
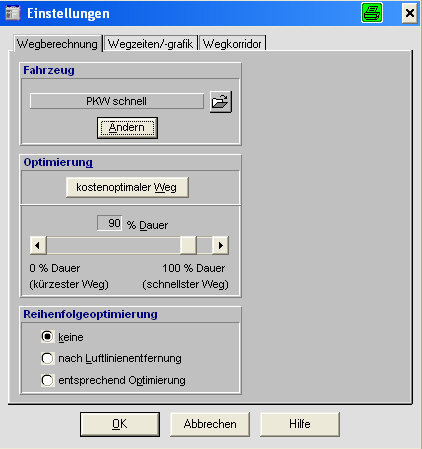
Nach Eingabe eines Zielorts (einer Adresse oder einem anderen definierten Punkt auf der digitalen Karte) berechnet die Routenplanungssoftware mittels ausgeklügelter Algorithmen innerhalb von Sekunden eine mögliche Route und die dazugehörige Fahrzeit. Natürlich gibt es zahlreiche Alternativerouten, daher kann man bei fast allen Geräten die Präferenzen für die Auswahl einstellen. Im Extrem muss man zwischen kürzeste Verbindung und schnellste Verbindung wählen, viele Programme lassen aber auch eine variable Gewichtung zu. |
|
|
|
Im Ergebnis errechnet das Gerät eine entsprechende Route mit den zugehörigen Navigationshinweisen. Moderne Navigationssysteme verwenden für die sog. dynamische Zielführung zusätzlich die Informationen des Traffic Message Channel (TMC) zur automatischen Umfahrung von Verkehrsstaus. TMC wird in zahlreichen europäischen Ländern ausgestrahlt, allerdings ist die Qualität der Meldungen sehr unterschiedlich. Die Routenplanungssoftware errechnet beim Auftreten eines Staus eine alternative Route, dabei berücksichtigt sie die voraussichtliche Durchschnittsgeschwindigkeit in Staubereich und auf den Ausweich-Strecken anhand der gewählten Präferenz (kürzeste Verbindung gegen schnellste Verbindung). Beispielhaft: Wenn ein 2 km langer Stau auf der Autobahn nur auf 8 km einer kurvenreichen Landstrasse mit zwei Ortsdurchfahrten umfahren werden kann, wird diese Ausweichstrecke wohl nicht vorgeschlagen. Ist aber parallel zu einem 10 km langen Stau eine gut ausgebaute, 12 km lange Bundesstrasse verfügbar, ist die Ausweichstrecke natürlich ein Muss. Vereinfacht ausgedrückt: Mit jeder zusätzlichen Umgehungsstraße steigt die Durchschnittsgeschwindigkeit auf der Landstrasse, mit jedem Stau nimmt sie auf der Autobahn ab und schon wird der Transitverkehr vom Computer aufs Land geschickt!
|